前回のベルト蛇行防止装置(5)では、蛇行防止装置の動きについて述べました。
今回は弊社開発のベルト蛇行防止装置(EPC)の動きの中で、制御の流れについて述べます。
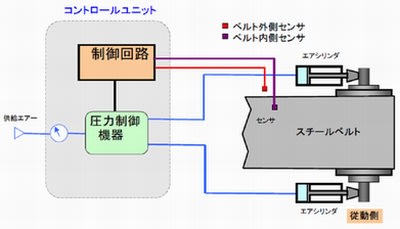
下の図は、コントロールユニットとスチールベルトコンベヤの従動側の部分をイラスト化したものです。
従動側にはエアシリンダが左右に配置されています。
エアシリンダの動きについては既に、ベルト蛇行防止装置(5)で説明していますのでご覧ください。
ベルト蛇行防止装置はセンサ、コントロールユニット、エアシリンダが重要な役目を担っています。
イラストの絵では、外側・内側のセンサ間でちょうど釣り合っている状態です。
どちらかのセンサに感知されればその信号がセンサ→制御回路→圧力制御機器→エアシリンダの順に電気信号、エアー圧力となって伝わり、プーリ軸を押し出したり、緩めたりします。
スチールベルト蛇行防止装置の制御
理屈としては簡単なことですが、そこにスチールベルトの幅、機長、高温度、搬送荷重、ベルトスピード、供給エアー圧力など、様々なファクターが入ると制御は単純ではなくなります。
弊社は今まで経験して取得したデータと走行試験により、様々な条件下に対応できるよう取り組んでいます。
高い温度下、高い温度のワーク搬送、幅広ベルト、高速走行など、高張力ステンレス鋼とベルト蛇行防止装置をセットでご検討頂ければ幸いです。
次回は、ベルト蛇行防止装置(7)をお伝えします。
過去の、
ベルト蛇行防止装置(1)
ベルト蛇行防止装置(2)
ベルト蛇行防止装置(3)
ベルト蛇行防止装置(4)
ベルト蛇行防止装置(5)
もご覧ください。